BCS100 kalibrazioaren helburua zuzi-buruaren eta xafla metalikoaren arteko kapazitantziaren eta distantziaren arteko erlazioa zehatz-mehatz ezartzea da.ebaketa egonkorra, eraginkorra eta zehatza bermatzea
errendimendua.
Makina abiarazi, xafla metalikoa ordezkatu edo tobera aldatu ondoren kalibrazio berri bat egin behar da.
Lehen servo kalibrazioa (F1)
Servo kalibrazioa motorraren mugimendu-ezaugarriak lerrokatzeko erabiltzen da, buru flotatzailearen kalibrazio zehatza eta altuera automatikoki jarraitzeko oinarria osatuz.
Eragiketa urratsak:
1. Jarri xafla metalikoa ebaketa-mahaiaren gainean laua.
2. Erabili softwarea edo eskuzko kontrolagailua mugitzekometalezko laser bidezko ebaketa makinaburura maindirearen gaineko posizio egoki batera.
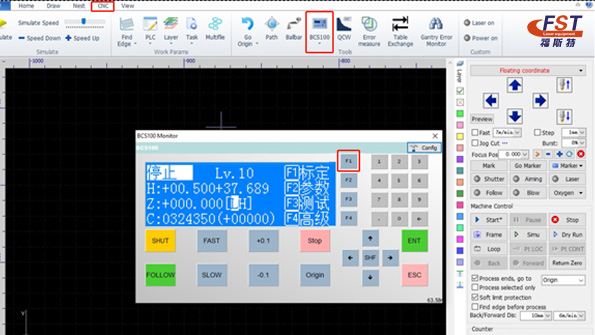
3. Ireki CNC interfazea → egin klik BCS100 ikonoan → hautatu F1 Kalibrazioa.
4. Egin klik 1 – Servo kalibrazioa aukeran.
Oharra:
Serboaren kalibrazioan zehar, motorrak oszilazio-mugimendu txikiak egingo ditu.
Ziurtatu Z ardatza bere ibilbidearen erdialdean kokatuta dagoela oszilazioan gehiegizko ibilbidea saihesteko.
5. Sakatu kalibrazioa hasteko. Sistemak prozesua automatikoki osatuko du.
6. Amaitutakoan, itzuli aurreko menura.
Serboaren zero desbideratzea garbitzea (aukerakoa)
Serboaren zero desbideratze balioa okerra bada:
Sakatu Garbitu → eta ondoren sakatu berresteko → aurreko menura itzultzeko.
Bigarren Buru Mugikorreko Kalibrazioa (F2)
Buru flotatzailearen kalibrazioak sentsorearen altueraren eta kapazitantzia-balioen arteko korrelazioa ezartzen du, ebaketa-prozesuan altueraren jarraipen zehatza bermatuz.
Eragiketa urratsak:
1. Sakatu 2 Buru Mugikorreko Kalibrazio interfazera sartzeko.
2. Erabili beheranzko gezia laser-burua jaisteko, xaflaren gainetik 1-5 mm egon arte.
3. Ziurtatu xafla egonkor eta bibraziorik gabe dagoela.
4. Sakatu kalibrazioa hasteko.
Kalibrazio prozesu automatikoak 10-15 segundo inguru irauten du:
1. Buru flotatzailea poliki jaisten da xaflaren gainazala detektatu arte.
2. Xafla ukitu ondoren, apur bat altxatzen da sentsorearen egonkortasuna ebaluatzeko.
3. Ondoren, aurrez zehaztutako distantzian gorantz mugitzen jarraitzen du sentsorearen leuntasuna eta kurba karakteristikoak ebaluatzeko.
4. Sakatu gordetzeko. Altuera-kapazitantzia kurba bistaratuko da orduan.
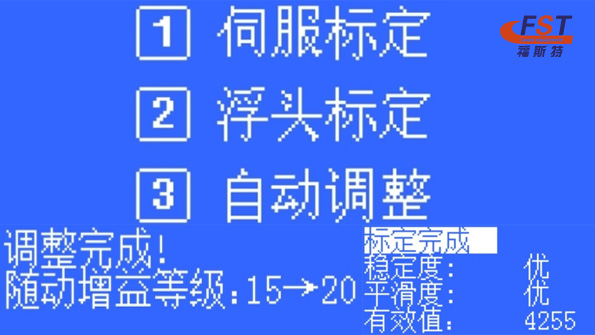
Parametroaren deskribapena:
Egonkortasuna:Kapazitantzia-seinalearen errendimendu estatikoa islatzen du. Egonkortasun eskasak plakaren bibrazioa edo kanpoko interferentzia adieraz dezake.
Leuntasuna:Kalibrazioan zehar kapazitantziaren aldaketaren errendimendu dinamikoa adierazten du.
Bi parametroek gutxienez “Ertaina” izan behar dute, eta “Ona” edo “Bikaina” da aproposa.
Balio eraginkorra:Xaflaren gainetik 0,5 mm-tik urruneko posizio baterainoko kapazitantziaren aldaketa-tartea adierazten du.
Balio altuagoek sentsore-eremu zabalagoa adierazten dute, eta horrek jarraipen-zehaztasun eta egonkortasun hobea dakar.
Hirugarren doikuntza automatikoa (F3)
Doikuntza automatikoak barne parametroak fintzen ditu ebaketa-prozesuan altuerari jarraipen leunagoa eta sentikorragoa bermatzeko.
Doikuntza automatikoan sartu aurretik, ziurtatu honako hau:
Servoaren kalibrazioa amaitu da
Makina hasieratu da, eta Z ardatzeko koordenatu mekanikoak zuzenak dira.
Buru flotatzailearen kalibrazioa osatu da eta behar bezala funtzionatzen ari da
Xafla bat kokatzen da buru flotatzailearen azpian jarraitzeko
Operazioa:
Sartu Doikuntza Automatikoko interfazean → sistemak automatikoki doituko ditu altuera jarraitzeko parametroak → gorde eta amaitutakoan irten.
Kalibrazioa osatuta!laser ebakitzaileaZehatzago, leunago eta eraginkortasun handiagoz.
Hiru kalibrazio-etapa guztiak osatuz — Servo Kalibrazioa → Buru Mugikorreko Kalibrazioa → Doikuntza Automatikoa —, BCS100ak altuera detektatzeko eta jarraitzeko errendimendu optimoa lortzen du, ebaketa-kalitate fidagarria bermatuz.
aldi oro.
Argitaratze data: 2025eko azaroaren 14a

